012024
PANDA Manipulator
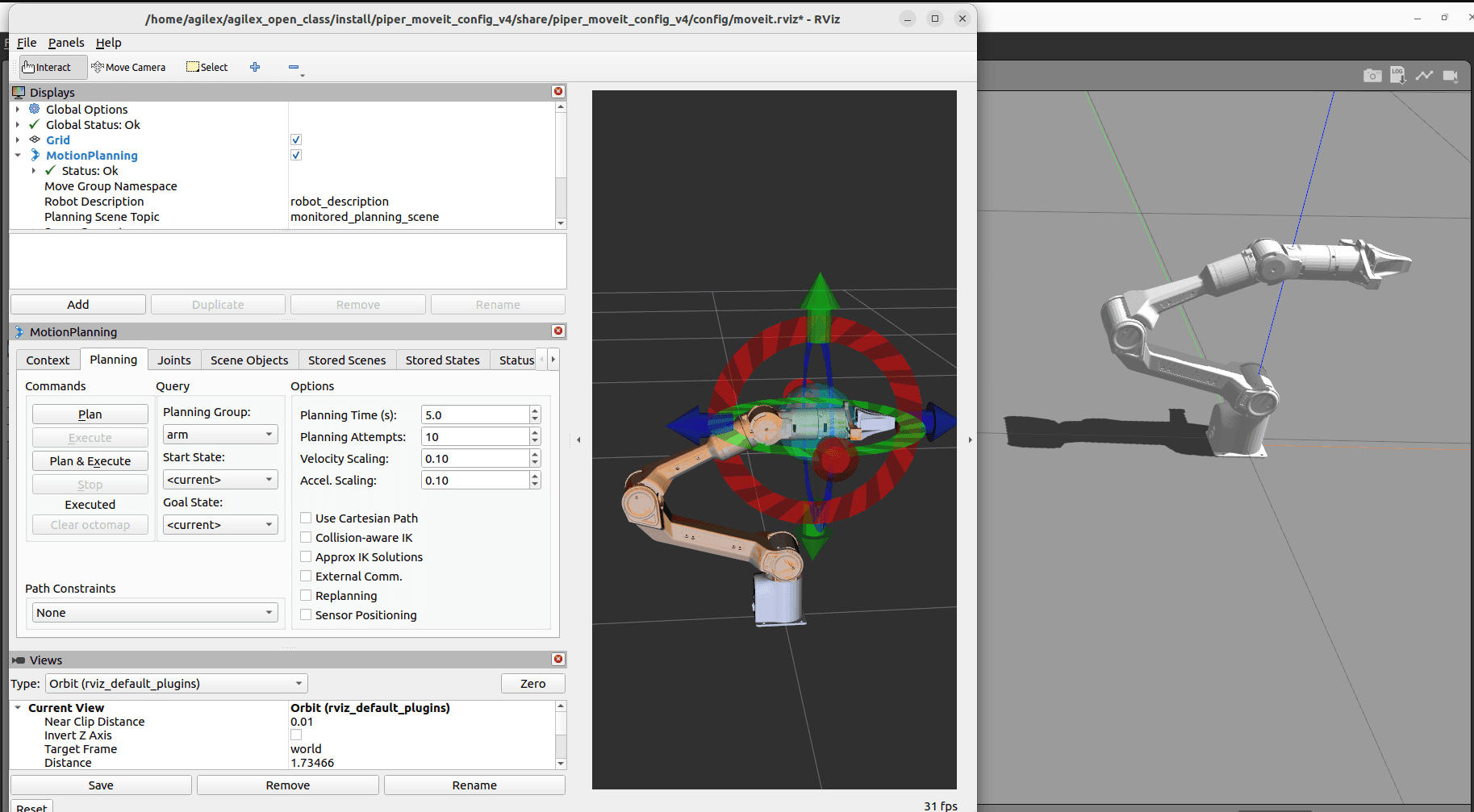
MoveIt 2 pick-and-place on a 7-DOF arm.
- ROS 2 Humble
- MoveIt 2
- C++
- URDF / Xacro
- Gazebo
Robotics R&D / Software
Robotics R&D engineer.I build motion systemsand the firmware that runs them.ROS 2, MoveIt, custom CAN-bus actuator SDKs,real-time stereo perception, mobile teleop.Currently shipping at RoboJoe Dynamics.

Years in robotics
Industry · academic
M.Eng GPA
UMD Robotics
Robots deployed
FR5 · 6-DOF · 9-axis
ROS 2 packages
Open source
Custom firmwares
Teensy · Arduino · TI
MoveIt 2 pick-and-place on a 7-DOF arm.
Centralized + decentralized planning across TurtleBot3 swarms.
TQC + PPO + TRPO trained for hardcore-mode terrain.

Real-time stereo planner on VOXL 2 + PX4.
Fine-tuning Qwen2.5-1.5B on the abstract reasoning corpus.

C++17 + ROS 2 driver for X-series CAN bus motors.
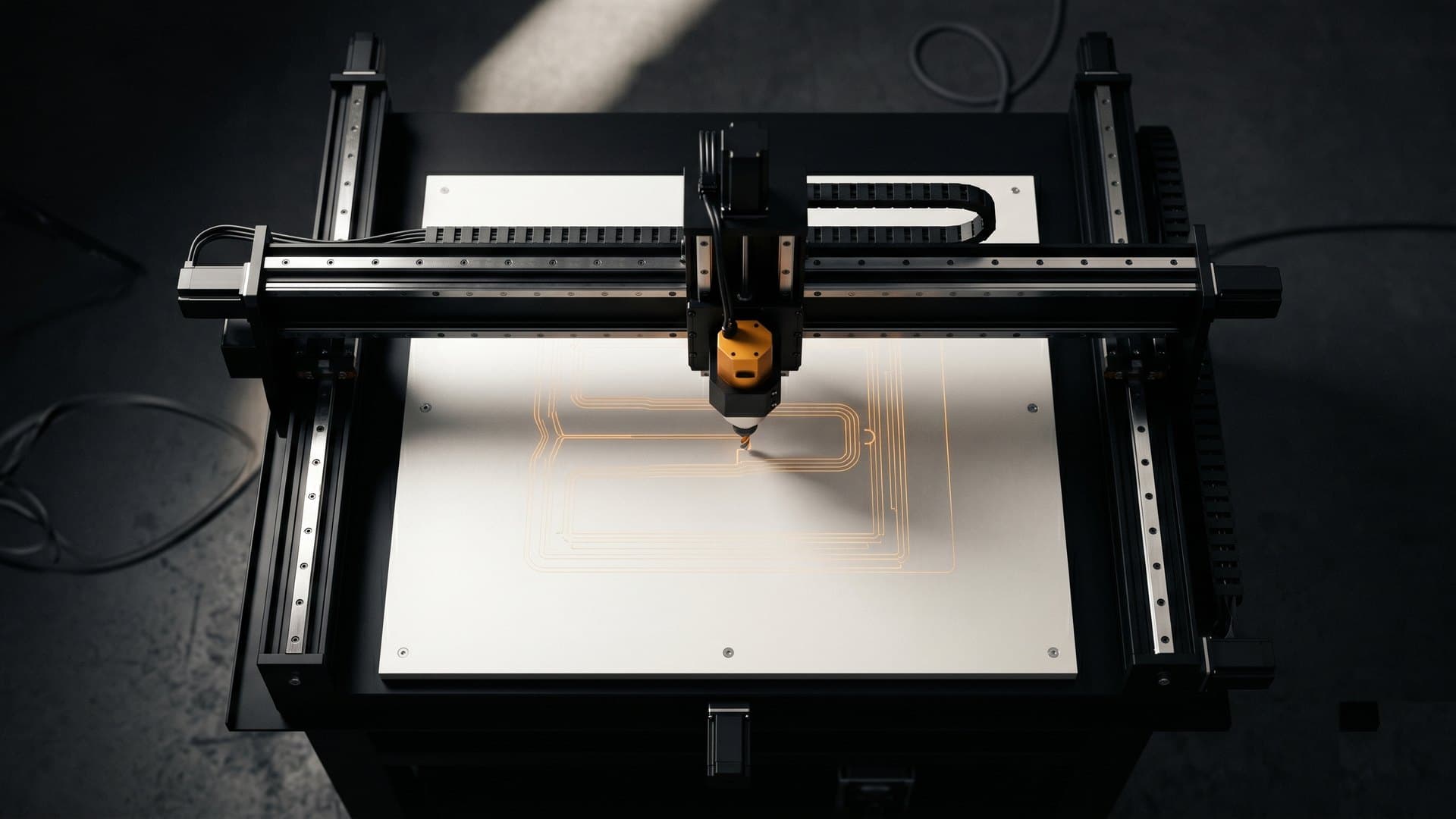
A Klipper-for-CNC fork running synchronized gantries.
The robotis the easy part.The world itlives inis the hard part.
You’ve seen the engineer.
Know the builderContinue/builderSlower. Warmer. Hands-on. Hardware tinkering, home-lab builds, jail-broken firmware, things made for the love of making them.