01/ Problem
Problem
Build a full pick-and-place pipeline for a 7-DOF Panda arm: collision-aware planning, gripper actuation, multi-waypoint sequencing.
MoveIt 2 pick-and-place on a 7-DOF arm.
Build a full pick-and-place pipeline for a 7-DOF Panda arm: collision-aware planning, gripper actuation, multi-waypoint sequencing.
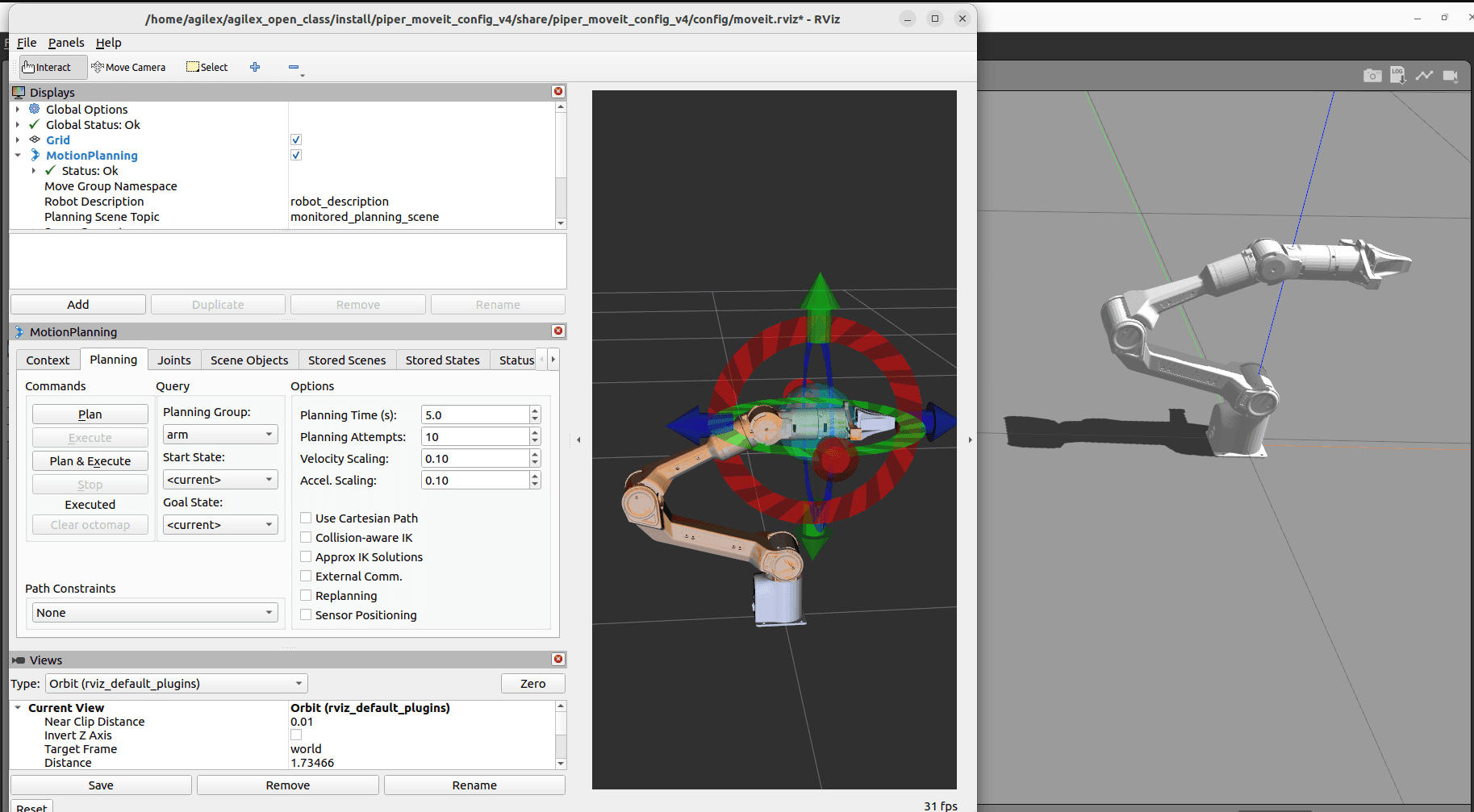
ROS 2 Humble + MoveIt 2 motion planning with default to pick to place to return waypoint sequencing. TypeScript + ROS variant of the move-robot script for browser-side control.
Franka Emika Panda (simulated). 7-DOF arm. Two-finger gripper. Gazebo physics. URDF/Xacro robot description.
End-to-end pick-and-place demo with collision avoidance and per-waypoint gripper actuation. Reproducible in any ROS 2 Humble environment.